

【摘要】機器人工程屬于具有綜合性質的科學,其能夠將機械理論、自動控制、電子技術等學科全面涵蓋。隨著科學技術有著越來越迅速的發展,機器人工作在智能化、人性化以及可靠化等方面有著較高的要求。自動控制技術中單片機控制技術屬于較為重要的一種技術,在智能化儀器、工業控制等范圍廣泛的應用。本文就單片機控制系統在智能機器人系統中的具體應用進行全面探討,確保能夠促進機器人工作的智能性以及可靠性有所提高。
【關鍵詞】智能機器人;單片機;控制系統;應用
1.前言
最近幾年,單片機控制技術有著越來越快的發展腳步,目前已經變成自動控制技術中較為重要的一種。單片機控制技術主要是在小塊的芯片中集成大部分的功能,能夠將計算機系統中較多的功能全面完成。單片機控制技術能夠將外部總線、內部總線、內存以及CPU等系統全面提供,同時在外部總線系統中還能夠為外圍設備提供定時器以及通訊接口等。部分單片機技術還能夠將網絡、圖像、聲音等集成,促進全面并且強大的控制系統得到實現[1]。單片機技術應用在智能機器人中,能夠在很大程度上促進運作機器人可靠性以及準確度得到明顯提高,確保液晶顯示、聲控、語音、探測、定位以及準確跟蹤等能力得到全面實現。

2.不同電路模塊以及單片之間的連接技術
2.1視覺模塊的連接技術
智能機器人中主要的導航控制體系是視覺模塊,機器人控制系統在實際工作過程中,通過對機器人所處位置采用傳感器進行定位檢測等措施,采用調理信號裝置的方式將位置進行進行A/D轉換以及放大等處理,在單片機中輸入信號通過單片機系統時則會自動比較原設定值以及濾波,通過相應的計算后,將PWM的調頻信號輸出,使電機轉速能夠通過變換頻率進行控制,促進智能機器人的行走方向能夠順著誘導路線進行。
2.2機器人探測地面模塊電路技術

智能機器人探測地面的能力主要是通過將亞超聲模塊進行安裝才能夠全面實現,一旦控制系統結構接收到從外部傳來的亞超聲時,通常情況下,智能機器人則會根據傳來的亞超聲做出簡單動作以及停止等不同反應,確保人類的聽覺功能得到全面模擬。通過分析得知,輸出亞超聲信號的主要是通過開關模塊進行,信號通過光電開關可以實現觸發單片機上的功能,單片機超聲模塊則通過低電平信號使開關狀態在模塊開關中得到保持。
2.3控制系統中顯示模塊電路
單片機控制技術應該在智能機器人中獲得最明顯的效果是智能機器人能夠與人進行正常的交流溝通。通過分析相關控制系統的資料得知,外接端子以及單片機的結構位置場通過液晶模塊進行限制,比較常使用的顯示方式是通過輸出英文,而英文字庫常常隱藏在液晶顯示模塊的內部機器人常用的單片機使用經驗,能夠較為方便的使用,在液晶顯示頁面顯示時能夠清楚的了解。通常情況下,均是通過模擬的方式進行連接,系統的顯示屏則接受到從外部傳來的信號,液晶顯示屏在控制系統運行過程中常是以讀寫數據的情況存在。
2.4控制系統中校正步伐模塊的運用

因為智能機器人的運用功能主要是通過兩個電機的運行功能在輔助進行的,所以,如果兩個電機出現不同的轉速步伐,會導致智能機器人有著不相同的步伐,機器人在實際的運行過程中會出現打亂的情況,所以,應該通過校正步伐的方式對機器人進行調整。通常情況下,將機器人步伐調整在相同狀態下,主要是通過兩個光耦進行,在智能機器人腿部之間的擋片中將光耦進行安裝機器人常用的單片機使用經驗,一旦智能機器人處于正常行走的狀態時,腿部擋片在交替之間會對光耦啟到開閉的作用,所以,如果單片機控制系統兩邊的端子始終無法全面接收狀態信號時,則表示智能機器人在行走時有著正常的步伐,如果能夠一致的接收狀態信號時,則代表智能機器人有著錯亂的步伐,可以通過校正模塊的方式將機器人的步伐進行校正。
2.5控制系統中的語言模塊電路
通常控制系統有著錯誤操作或者運行時出現錯誤的情況時,均無法獲得相關人員的重視,因此,則要通過語音提示的方式確保第二重提示得到實現。智能機器人在運用單片機控制技術時,單片機中的芯片具有一體化錄放、高保真等的基本特征,在集成電路中具有單片固態語音等作用,一體化錄放能夠滿足120s的要求,同時能夠將錄音反復錄放無數次,在使用過程中,不需要進行驅動處理,僅僅需要通過將端口進行控制便能夠實現語音電路控制等操作,播放錄音之前需要將聲音文件輸入控制系統,從根本上促進智能機器人語音提示的能力得到全面實現。
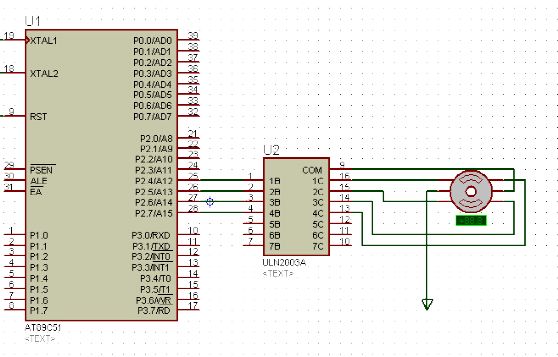
2.6控制系統中驅動模塊電路

單片機控制技術運用在智能機器人的系統中驅動模塊電路是非常重要的,其主要是將弱電流信號輸出,通過相應的管材加強放大弱電流信號,使電機強度受到驅動繼電器全面控制的操作得以實現,使電機驅動的操作得以完成。驅動模塊電路中的三極管能夠起到保護基極的作用,繼電器的作用與雙擲開關的作用相同,繼電器能夠構成正反轉的電機,并且將回路進行控制,確保機器人能夠將后退以及前進的動作完成[2]。采用驅動模塊線路主要的優勢是在電流信號輸入時不會影響控制系統,同時能夠給驅動電機的正常運行提供相應的電流,確保智能機器人能夠穩定的運行。
3.智能機器人運用單片機控制系統實現的具體功能
首先將機器人啟動,確保機器人能夠處于正常運行的狀態,機器人在實際移動操作時,通過語音向機器人提出“搜索目標中”的相關指示,此時液晶顯示器則會出現“目標正在搜索中”的顯示,機器人在前進過程中找到目標時,則會出現“發現目標”的語音提示,如液晶出現“找對象”等提示時,機器人則往目標的方向前往,一旦與有關距離有差距時,機器人則會出現將障礙自動避開的情況,將運行路線全面改變。如果機器人在運行過程中與障礙物出現撞上的情況,那么語音則會出現“前方存在障礙物”的提示。如液晶上有“障礙即將”的顯示時,那么機器人則會改變自身的運行方向,通過往相反方向進行轉角的操作后,再繼續往前方移動。如果機器人前行的前方地面出現斷層的情況時,那么語音則會出現“警告,前方有障礙”的提示時,機器人則會往后方后退兩步,將前進的方向改變后再繼續往前方移動,如果機器人在實際運行時有錯亂步伐等情況,那么系統則會自動調整錯亂的步伐,確保步伐得到校正后才能夠繼續前行。
4.結束語
智能機器人控制系統采用單片機技術能夠在很大范圍上將模擬人類簡單思考、語音、聽覺、觸覺以及視覺等功能全面完成。智能機器人通過運用單片機通訊,具有構思靈活以及方法巧妙等基本特征,能夠將傳感器優先級以及協調等問題全面解決,促進方案設計得到簡化,使可靠運行得到實現。目前,智能機器人運用單片機技術仍沒有較為深入的研究,隨著逐漸完善單片機控制系統,在智能集體人的研究工作中有著越來越重要的作用。
參考文獻
[1]程玉凱,陸倩.基于單片機控制的智能機器人系統設計[J].寧波職業技術學院學報,2011,7(05):245-246.
[2]肖珊,魏勇.基于單片機的智能機器人的設計[J].電子質量,2011,1(12):856-857.