

本節要點
掌握MoveL指令的使用
掌握MoveL和MoveJ指令的區別
要點解析
>>>>MoveL指令
機器人以線性移動方式運動至目標點,當前點與目標點兩點決定一條直線,機器人運動狀態可控制abb機器人校tcp點方法,運動路徑唯一abb機器人校tcp點方法,可能出現死點。MoveL 指令常用于機器人在工作狀態移動。
如圖 1所示,MoveL 指令示例如圖2所示。
圖1-線性運動路徑

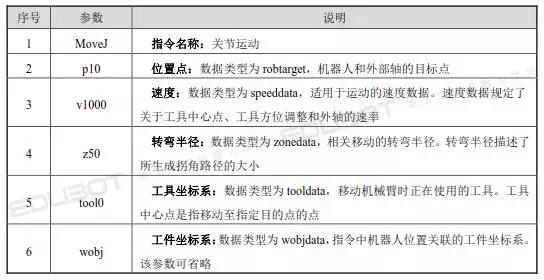
圖2-MoveL指令示例
MoveL指令示例各部分含義見下表。
MoveL指令各部分含義
>>>>MoveL和MoveJ指令的區別
MoveL和MoveJ指令的區別見下表。
MoveL和MoveJ指令的區別
操作步驟
>>>>程序編寫
程序編寫的操作步驟見下表。
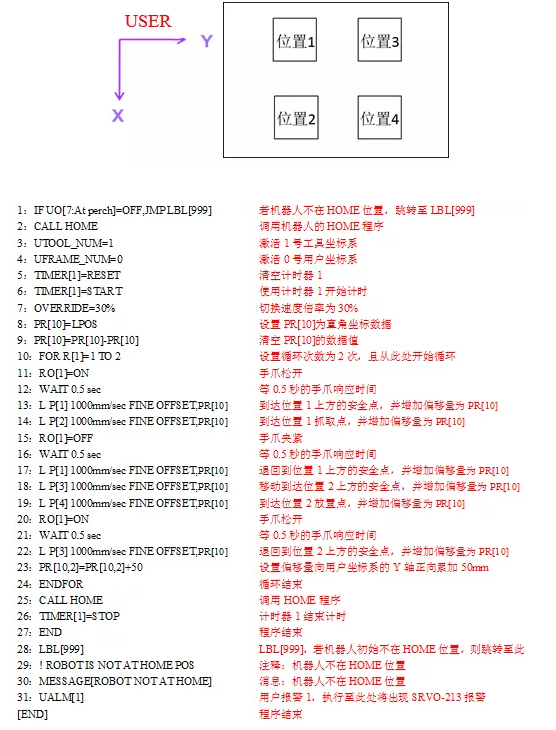
程序調試
程序調試的操作步驟見下表。
=往期教程=
ABB機器人知識點之 IRB 120介紹
ABB機器人知識點02【IRB 120安裝】
ABB機器人知識點03|示教器概述

ABB機器人知識點04|零點校準
ABB機器人知識點05|動作模式——單軸運動
ABB機器人知識點06 動作模式(線性模式)
ABB機器人知識點07 動作模式 重定位運動
工業機器人教學:ABB機器人知識點09 工作空間
工業機器人培訓:ABB機器人知識點10|運動坐標系
ABB機器人知識點11|工具坐標系定義——TCP(默認方向)
ABB機器人知識點12|工具坐標系定義——TCP和Z

ABB機器人知識點13|工具坐標系定義——TCP 和 Z,X
工業機器人培訓 ABB機器人知識點14|工件坐標系定義
工業機器人培訓 ABB機器人知識點15 工件坐標系定義
工業機器人課程:ABB機器人知識點16 | I/O 硬件介紹
ABB機器人知識點17 | I/O 信號配置
工業機器人課程:ABB機器人知識點18 |系統I/O配置
工業機器人課程:ABB機器人知識點19 | 安全信號
工業機器人課程:ABB機器人知識點20 | 創建模塊及程序
工業機器人課程:ABB機器人知識點21 | 程序數據
工業機器人課程:ABB機器人知識點22 | 運動指令——MoveJ